科普一下力学分析和有限单元法
力学学科按照周培源老先生的说法是研究宏观物质的运动和变形的理论。
力学的基本的研究对象可以分为刚体、变形体和质点。
研究刚体和质点的力学是理论力学。
例如有质心的牛顿三大定律和刚体转动的牛顿方程。该学科需要研究刚体的质心,刚体的转动,运动状态(质心,转动)和力的平衡。
变形体按照形状的复杂程度可以分为简单形状和复杂形状。
材料力学和结构力学是研究简单形状的变形体的学科。其中有三大重要的方程。分别是——几何变形方程、力的平衡方程、物理本构方程。几何变形方程是研究变形体的变形,力的平衡方程是研究力学方面的平衡,物理本构方程是研究材料的物性的。
对于复杂形状的变形体,按照变形范围可以分为小变形、屈服和非线性变形,对应的学科是弹性力学和弹塑性力学。弹性力学和弹塑性力学的求解方法主要有解析法和半解析法。
力学现象可以通过微分形式的方程来描述,求解偏微分方程的方法有解析方法和近似方法。解析方法即方程解的精确解,可以通过一个数学表达式准确表达。
近似方法主要有差分方法和试函数方法。差分方法是通过有限差分来近似导数,从而寻求微分方程的近似解。试函数方法则是通过试函数的残差最小化寻得微分方程的近似解。试函数由待定系数和基底函数组成,基底函数需要满足微分方程的边界条件,而残差最小化则是找到最优待定系数使得试函数最接近精确解。
从求解精度上来说,解析解得到的结果是完全准确的。差分法的求解精度依赖于分段数,分段越多,解就越精确,试函数法的求解精度依靠选取的试函数模式。
对于试函数法,如果采取多个待定系数,其结果会更加的准确。
对于复杂形状的变形体,其方程的近似解通常会采用函数逼近的方式实现。
函数逼近的方式通常有两种——基于傅里叶的级数展开(也称全域展开)或基于子域的展开形式。基于傅里叶的级数展开,其基底函数复杂,逼近的精度更高。而基于子域的展开形式其基底函数简单,需要分多段才能得到较好的逼近精度。
而对于复杂的几何区域,其逼近函数通常采取分片构造试函数然后拼接的形式展开。
有限单元法的核心则是针对复杂的几何区域的分片函数的逼近。三大方程——几何方程、平衡方程和物理方程分别控制位移、应力和应变。
为了除了3D空间当中的问题,需要引入针对3D空间的指标记法,使得对问题的表征更加简洁。因此,三维的结构力学分析和有限元分析通常会使用到张量。
张量是用指标表示法表示的物理量。
张量有以下的几个特征:
它是描述客观存在的物理量,具有坐标不变性;
在不同参考系下有不同的坐标分量
分量之间满足坐标变换关系
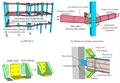
复杂变形体的建模思路通常有内部描述(域值)和外部描述(边界条件),内部和外部的描述均是通过微小单元体来实现的。
下面再来说说变形体力学的方程求解方法。以弹性力学为例:
可以对原始方程直接求解。方法有解析法、半解析法和差分法。
也可通过间接(误差处理)的方式对原始方程求解,常见的方法有:
加权残值法(weighted residual method)
虚功原理(principle of virtual work)
最小势能原理(principle of minimum potential energy)
变分方法(variational method)
如果采用间接的方法,就需要先设置满足边界条件的解,即试函数;然后在带入原控制方程、误差最小化,求出待定系数。
常见的加权残值法主要有:
Galerkin加权残值法
残值最小二乘法(least squares method)
配点法
Galerkin加权残值法是以试函数的基底函数作为加权函数;残值最小二乘法则是通过调整近似函数中的待定系数,使得域内的残值的平方和的积分最小化;配点法则是相当于简单强迫余量在域内的N个离散点上为零。
弹性问题中加权残值法的要点主要有:
试函数需要满足所有的边界条件;
积分中试函数的最高阶导数越高,对试函数的连续性要求很高;
整个方法为计算一个全场(几何域)的积分;
由求取积分问题的最小值(即使其误差最小),将原方程的求解转化为线性方程组的求解。
力学分析通常会将3D问题简化为平面应变问题和平面应力问题。平面应变问题假设z方向的应变为0,平面应力问题假设z方向的应力为0。
对于平面应变问题和平面应力问题,除了物理方程以外,两问题的变量和方程都完全相同。
而对于空间弹性问题的完整描述,通常有2种方法:第一种是内部取出微元体分析,表面则是处理好边界条件;第二种方法是将2D问题推广为3D问题。
试函数的取法:
设有一组满足所有边界条件的试函数,也成为基底函数,将其线性组合就可以得到新的试函数。



