固定翼垂直起降VTOL无人机Star-CCM+结构流体多场耦合仿真应用案例讲解
- 作者优秀
- 优秀教师/意见领袖/博士学历/特邀专家/独家讲师
- 平台推荐
- 内容稀缺

导读:固定翼无人机作为现代航空技术的重要组成部分,在军事侦察、环境监测、物流配送、农业植保等多个领域发挥着重要作用。随着仿真技术的不断发展,固定翼无人机的仿真研究也日益深入。一、写在文前
固定翼无人机仿真是无人机设计与研发过程中的重要工具,也是提升无人机性能、降低成本、确保安全性的关键手段。通过仿真,可以模拟无人机在不同飞行条件下的气动性能、动力性能、控制性能等,从而预测其在实际应用中的表现。这有助于工程师在设计阶段就发现问题并进行优化,提高无人机的整体性能。例如,优化机翼形状、调整发动机布局、改进控制算法等,都可以通过仿真来验证其效果。无人机研发过程中需要大量的实验测试来验证设计方案的可行性。然而,实验测试不仅成本高昂,而且周期长、风险大。通过仿真,可以在虚拟环境中进行多次迭代和优化,减少实物试验的次数,从而显著降低研发成本。无人机在飞行过程中可能遇到各种复杂和危险的环境条件,如强风、雷电、机械故障等。通过仿真,可以在安全的环境下模拟这些极端情况,评估无人机的应对能力和安全性。这有助于在设计阶段就采取必要的措施来提高无人机的安全性和可靠性。仿真技术可以大大缩短无人机的研发周期。通过快速迭代和优化设计方案,工程师可以更快地找到最佳的设计方案,并验证其可行性。这有助于加速无人机的研发进程,使其更快地投入市场应用。
2024航空航天设计仿真(二):使用Star-CCM+搞定航空流固耦合难题-仿真秀直播

二、固定翼无人机仿真应用有哪些
在固定翼无人机的设计与研发过程中,整机气动仿真是一项至关重要的技术环节。不仅能够帮助工程师预测无人机在不同飞行条件下的气动性能,还能为设计优化提供科学依据。在整机气动仿真中,移动参考系法和刚体运动法是两种常用的方法,它们各有特点,适用于不同的仿真需求。(1)移动参考系法
移动参考系法(Moving Reference Frame Method, MRF)是一种处理复杂流场问题的有效手段。在固定翼无人机的整机气动仿真中,移动参考系法通过将无人机及其周围的流场视为一个相对运动的系统,从而简化计算过程。具体而言,该方法首先定义一个与旋转部件相对静止的参考系,然后在这个参考系内求解流场方程。在稳态模拟或不需要时间精确求解的瞬态模拟中,移动参考坐标系提供了一种方法可将刚体旋转和平移建模为稳态问题,而不移动网格。此建模方法在移动参考坐标系中将瞬态问题转化为稳态问题,从而提供时间平均求解。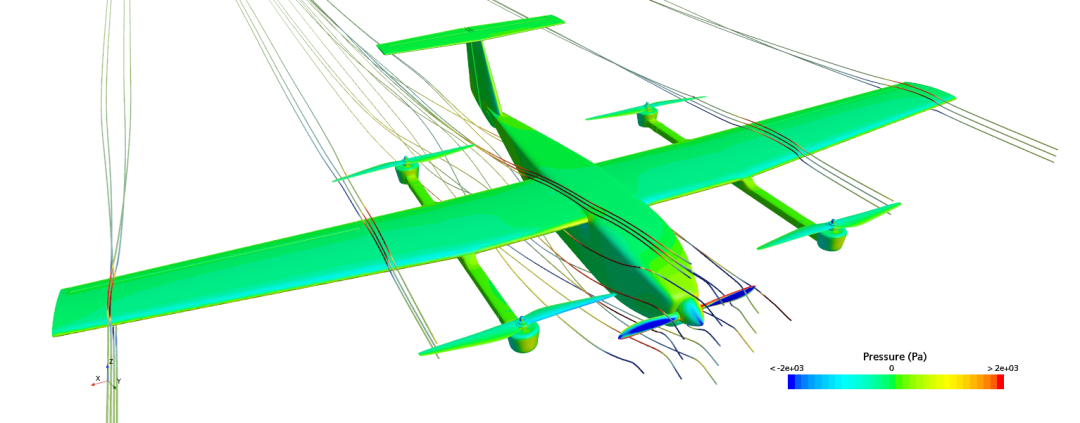
(2)刚体运动法
刚体运动法(Rigid Body Motion Method, RBM)是指在仿真中,将某些物体视为刚体,并模拟这些刚体在流体流动作用下的运动;当需要时间精确行为时,刚体运动法可在瞬态分析期间移动网格节点,刚体运动模型包括旋转,平移;刚体运动法也称之为滑移网格法,该方法通过网格的旋转来模拟桨的真实运动,在旋转域和外部静止域之间通过交界面进行流场信息传递,是一种瞬态方法。刚体运动法可以获得流场的全部瞬态信息,比如压力脉动、流场演变等,但是计算时间较长,对硬件的要求也更高。
移动参考系法和刚体运动法各有其适用范围和优势。在固定翼无人机的整机气动仿真中,可以根据具体的仿真需求和目标选择合适的方法。
2、固定翼无人机起飞仿真
起飞是固定翼无人机飞行过程中的关键环节,起飞仿真通过模拟无人机从地面起飞到达到稳定飞行状态的过程,评估其起飞性能。在固定翼无人机起飞仿真中,采用的是动态流体相互作用的方法,动态流体相互作用 (DFBI) 用于使用定义的机械和多物理场相互作用(流动、DEM颗粒、固体应力)生成的位移和旋转来模拟 6 自由度体的运动。在每个时间步中,将在刚体上施加合力与力矩,并求解运动的控制方程以查找刚体的新位置和方向。3、固定翼无人机机翼流固耦合颤振
流固耦合(Fluid-Structure Interaction,简称FSI)研究的是可变形固体在流场作用下的各种行为以及固体变形对流场影响这二者之间的相互作用,这种相互作用涉及复杂的物理现象,包括流体动力学、固体力学以及它们之间的界面耦合。流体和固体之间通过界面力(如压力、剪切力等)进行相互作用,流体的流动会影响固体的变形,而固体的变形又会反过来影响流体的流动。流固耦合中,流体采用有限体积法求解,固体采用有限元求解,交界面通过映射传递数据。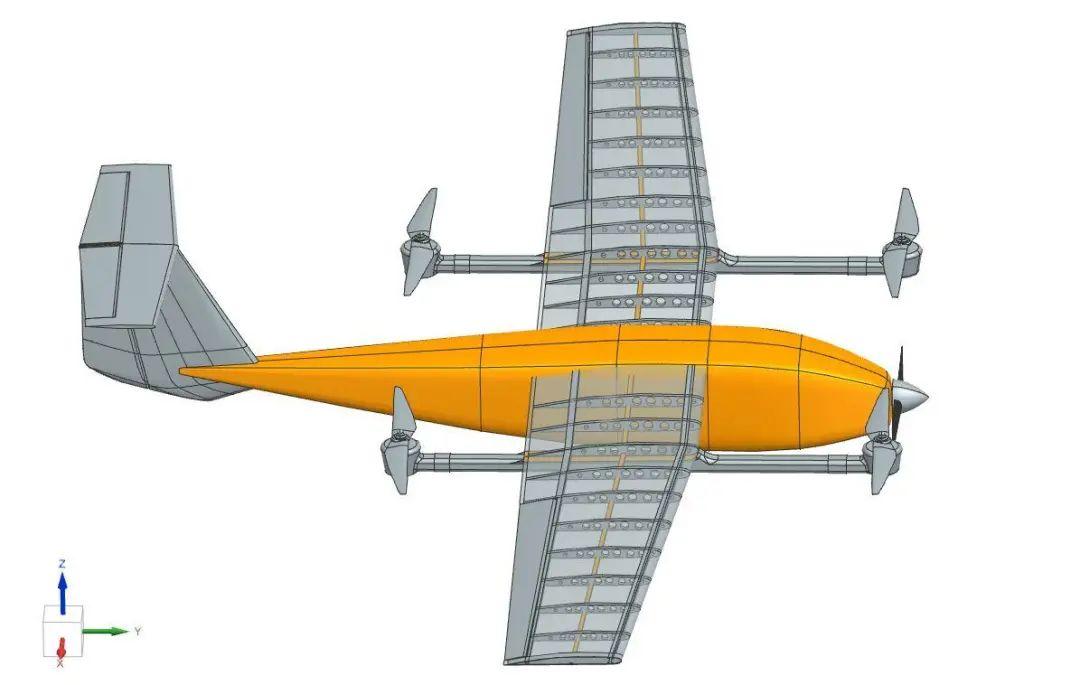
4、固定翼无人机重叠网格法舵效仿真
重叠网格方法用于离散具有以任意方式相互重叠的多个不同网格的计算域,最适用于处理可以将几何封闭在重叠区域中并设为不同位置的大型运动。重叠网格方法通过在一个区域的受体网格单元与另一个区域的供体网格单元(具体来说就是标记为活动的网格单元)之间交换数据来耦合区域。典型的重叠模拟具有封闭整个求解域的背景区域以及围绕体(如船体或翼面)的重叠区域,重叠区域的外表面定义为重叠边界。
5、固定翼无人机网格重构法舵效仿真
几何形状的变化可能会因为变形导致的单元质量下降而需要重新划分网格,网格重构模型通过指定的网格标准和网格操作自动化这一过程。网格重构模型提供了一个通用的重新划分网格触发器,当网格质量下降到低于指定的网格质量标准时,执行选定的网格操作。该模型首先预测如果不进行重新划分网格,网格质量会如何,然后如果预测的质量违反了标准,则执行重新划分网格。当重新划分网格模型被激活时,变形过程以预测模式运行。即评估如果应用变形,则结果网格的质量,但不承诺使用该网格。如果网格质量违反了质量标准,则不对现有网格应用变形,而是重新划分网格模型执行选定的网格操作集。6、固定翼无人机机翼结冰仿真
固定翼无人机机翼结冰采用的是离散多相流方法结合融化凝固模型,利用 DMP 方法,背景空气会因拖曳力和热传递而影响水滴,但水滴不会对空气产生任何影响。液滴相的液体成分已转到翼型表面作为液膜,具有液膜属性的壳区域创建于翼型表面上,液滴影响壳区域并形成液膜。翼型表面上的液膜变成冰。随着结冰越来越厚,翼型形状必将改变。STAR-CCM+ 将膜中的冰体积转换为机翼表面相应的变形。使用网格变形变形机翼形状后, STAR-CCM+ 删除液膜层的冰体积,以这种方式将壳区域的形状变化会反映翼型表面上的积冰。7、固定翼无人机机翼模态分析
固定翼无人机的机翼模态分析采用的是正则模态法,在固体力学中,正则模态描述固体在一组固定频率(称为体的固有(或共振)频率)下的振荡运动。当固体结构受到固体共振频率的周期力的作用时,振荡幅值会放大。极端情况下,这种放大会导致固体永久变形或断裂。对受振动影响的结构进行建模的工程应用(如悬索桥和机翼),正则模态的计算至关重要。正则模态是某固定频率下随时间变化的无阻尼正弦运动模式。结构保持动态平衡,并经历自由振动。结构的正态模态和固有频率控制其动态响应。在固体力学中,正则模态和固有频率通常被称为特征模态和特征频率,它们根据常规非线性运动方程特征值问题进行计算。
8、固定翼无人机发射导弹仿真
无人机发射导弹,是将导弹建模为六自由度体,计算导弹在喷射燃气的作用下的运动情况,同时评估导弹为其对飞机的影响。在STAR-CCM+ 中的 6 自由度体表示运动由作用于它的各种力与力矩动态计算的刚体。对于 6 自由度体,对体点运动和体绕该点的旋转进行建模,该点是体的质心,体的任何其他部件的相对运动可以基于此确定;必须先已知体绕参考点(通常是质心)的惯性矩,然后才能计算旋转运动。9、固定翼无人机灭火
固定翼无人机洒水灭火采用了多种多相流方法,包括VOF方法、拉格朗日方法、液膜以及不同形式多相流之间的相互转换。VOF 多相模型用于求解涉及不混溶流体混合物、自由表面和相接触时间的问题。在此类情况下,不需要额外对相间相互作用进行建模,并且所有相共享速度、压力和温度场的模型假设将成为离散化误差。拉格朗日相是在拉格朗日架构中建模的离散相(液滴、气泡或颗粒),通过连续体来跟随类似于颗粒的单元(称为粒子束), 每个粒子束的状态均根据一组选定模型进行更新。VOF 到拉格朗日的转换由解析的欧拉-拉格朗日转换相间相互作用模型处理,当较小的球形水滴的直径低于特定阈值时,就会转换为拉格朗日液滴,当拉格朗日水滴和 VOF 液斑在底面碰撞时,会形成可积聚成水池的薄膜水坑。
10、固定翼无人机冲浪仿真
编队飞行中合理利用尾流冲浪技术,可使得后机获取明显的增升性能。基于该原理,按照候鸟迁徙飞行时所排成“V”字形设计了两架固定翼无人机组成的编队;利用CFD 绘制无人机与流体域的网格,对该飞行编队进行了数值模拟;并对飞行编队的气动参数进行优化分析,确定在不同间距和高度下后机升力和阻力的变化。
11、机翼参数化优化
机翼参数化设计是一种基于参数化模型的设计方法,通过改变不同的参数值来快速生成不同形状的飞机翼型。这种方法可以大大减少设计周期,同时可以根据需求进行多次优化。参数化设计允许工程师们以数学方式描述机翼的几何形状,并通过调整这些参数来探索不同的设计方案,从而优化出性能更好的机翼。12、机翼伴随形状优化
伴随法是用于预测许多设计参数和物理输入对某些相关工程量(即,模拟的工程目标)的影响。根据设计变量(输入)提供目标(输出)的灵敏度。伴随法的优势在于,用于获取目标灵敏度的计算成本不会随设计变量数的增加而上涨。计算成本实质上与设计变量数无关,因为对于任意数量的设计变量,伴随法只需要一个流体求解和一个伴随求解。伴随形状优化使用伴随灵敏度根据用户自定义成本函数衍生出优化的形状。灵敏度计算基于之前获取的伴随求解,使用网格灵敏度时,可通过加减一小部分的网格灵敏度计算控制点的新位置,可对网格进行变形来相应地增加或降低成本函数。对机翼采用伴随形状优化方法,计算升阻比对机翼外形的微分方程,从而获得敏感性,利用网格变形,采用自定义函数根据敏感性指出的方向,改变机翼的形状,从而获得性能提升的翼型。13、多段翼升力优化
多段翼型(multi-element airfoil)指的是机翼为增升效果而添加副翼、襟翼和缝翼等翼面而组成的多段机翼,因此也被称为高升力翼型。这种翼型设计通过增加机翼的复杂性和可调性,来实现在不同飞行阶段对升力的精确控制。襟翼是安装在机翼后缘的可动翼面,通过增加机翼面积和改变翼型弯度来提高升力。襟翼的优化设计包括调整襟翼的偏转角度、形状和位置,以在不同飞行速度下获得最佳的升力效果。缝翼通常安装在机翼前缘,通过开启缝隙来加速机翼上表面的气流,从而延迟边界层的分离,提高升力。缝翼的优化设计需要考虑其开启时机、缝隙大小和形状等因素,以最大限度地提高升力性能。利用HEEDS软件连接UG和STAR-CCM+,在UG里面创建不同形状的多段翼,STAR-CCM+对多段翼进行仿真计算,从而优化出升力提升的多段翼,整个流程全自动进行,无需人工干预。14、机身流体拓扑优化降低流阻
流体拓扑优化是通过调整流体在特定区域内的分布和流动路径,以最小化流动阻力、提高换热效率的一种优化方法。其基本原理在于,流体的流动方式对系统的性能有着重要影响,因此通过优化流体的流动结构,可以显著提升系统的整体性能。拓扑优化模型用于确定域主题内材料的最佳分布,此模型与拓扑物理模型和伴随模型结合使用来执行拓扑优化。此模型及其求解器使用基于伴随的灵敏度演变定义材料分布的水平集方程,来处理具有约束的单目标优化问题。启用此模型后,会自动计算拓扑物理模型使用的材料分布。优化器的目的是改变材料分布 𝜒 ,以最小化(或最大化)目标。对长方形机身,通过流体拓扑优化在机身前部和后部自动构建固体域,从而减小机身阻力。二、固定翼无人机结构流体多场耦合仿真全教程
以下是我课程安排
《Star-CCM 固定翼无人机仿真全教程150讲-整机起飞流固耦合舵效结冰发射灭火冲浪伴随流体拓扑优化》
1、本课适合哪些人学习:
学习型仿真的工程师
理工科院校学生和教师
STAR-CCM+软件用户和学习者
从事航空航天研发工程师
2、您将得到:
通过本课程的学习,跟着梁老师自学无人机仿真,你不仅可以掌握以下固定翼无人机仿真专项技能,你还将加入订阅用户VIP交流群,与同行交流,可向讲师提问,不定期分享行业内学习资料,提供高薪岗位内推和加餐直播等,还可以申请奖学金等附加服务等。
(1)掌握STAR-CCM+仿真计算流程及详细步骤(2)掌握STAR-CCM 优化计算流程及详细步骤(17)掌握机身流体拓扑优化降低流阻能力
获赞 10060粉丝 21526文章 3526课程 218






















