- 作者优秀
- 博士学历/特邀专家
- 内容充实
- 工程案例/内容体系完整
- 平台推荐
- 主编推荐/全网独家
- 增值服务
- Vip答疑服务
服务:
- 90天知识圈
- 在线开票
- 提供培训通知
本课适合哪些人学习:
1、有意向参加机器人竞赛的在校大学生
2、有意向从事机器人行业的毕业生
3、对python、opencv、树莓派、机器视觉感兴趣的初学者
4、可以作为机器人学习的入门课程
你会得到什么:
1、了解机器人发展概况及关键技术
2、掌握机器视觉、图像处理等与人工智能相关的基本概念
3、掌握步进电机、舵机、无刷电机的工作原理、选型方法和应用方法
4、掌握机器人运动学基本概念
5、了解树莓派主控板在视觉识别、图像处理中的独特优势
6、了解Linux系统常用命令、Python基本语法
7、能够通过开发平台实现电机速度和位置控制
8、能够通过相机和OpenCV实现颜色追踪和物体追踪
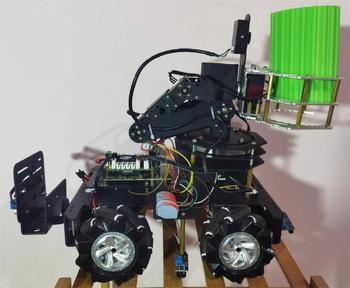
9、能够自主设计、制作一台物流智能机器人,能够通过扫描二维码或 Wi-Fi 网络通信等方式领取搬运任务,具有定位、移动、避障、物料位置和颜色识别、物料抓取与载运、上坡和下坡、路径规划等功能
课程介绍:

主讲:张老师/博士后 10年 行业经验
机械工程师,对于机器人在物流、检测、打磨、装配等不同领域应用有十年工作经验,主要研究方向为机器视觉、运动控制、过程控制、程序设计等,熟悉各种编程语言,掌握机械设计建模、有限元分析主流软件,具有丰富的机器人工程应用经验。
课程适用于机械设计制造及其自动化、机械电子工程相关专业本专科学生,以及对智能机器人感兴趣的初学者。本课程基于大学生工程实践与创新能力竞赛,提供生动有趣的智能机器人创新设计和实践课程,奠定学员机电一体化设计基础,让学员熟悉智能机器人设计开发过程,掌握与机器人设计相关的基础理论,了解智能机器人开发相关的软硬件平台,培养创新意识和实践能力。

智能物流机器人设计与实践32讲
第一章 绪论及入门实验
机器人基本概念、分类方法、发展概况及关键技术
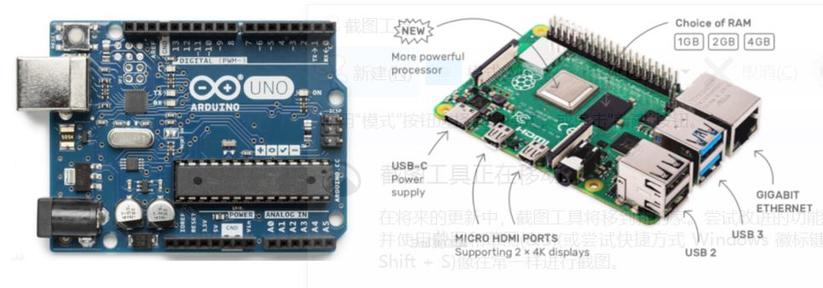
第二章 物流搬运机器人硬件组成
机器人开发平台硬件组成;主控板功能和特点;驱动板功能和特点、 接口定义、接线方法。
第三章 机器人控制软件开发
Python语法基础、Linux操作系统
第四章 电机控制原理
步进电机、舵机、无刷电机等电机的区别、构造、工作原理、主要 用途及选用方法;电机驱动器的基本原理及应用
第五章 机械臂运动控制
机器人坐标系建立、DH参数表创建方法、运动学正逆解计算、开发 平台介绍与使用
第六章 机器视觉应用
结构光、时间飞行、双目立体深度相机的工作原理;深度相机的性 能参数和配置方法;OpenCV安装与应用
课程相关图片: