简介
目录(试看)
评价
服务:
- 课程资料下载
本课适合哪些人学习:
1:在校研究生学习
2:职场新手
3:研究联合仿真的人员
4:从事工程机械和控制方向人员
5:从事机械设计的人员
你会得到什么:
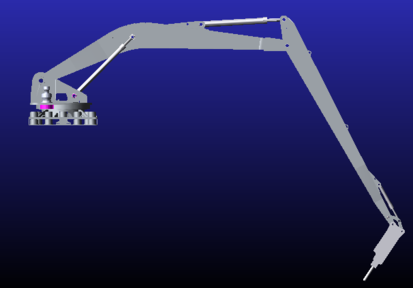
1:熟悉adams中机械臂的建模
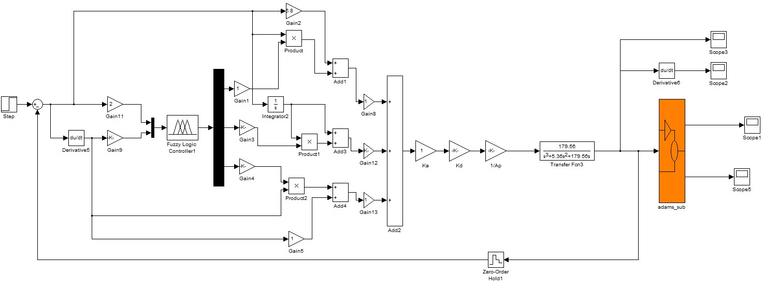
2:熟悉simulink中控制模块的设置
3:熟悉基于adams和simulink联合仿真设置过程
4:刚柔耦合的建模和adams中刚柔替换
5:熟练PID和模糊自适应PID控制模型搭建
课程介绍:
1:adams和matlab/simulink机械臂联合仿真,设置输入输出信号,详细解读联合仿真设置过程;
2:建模和adams和matlab/simulink的模型一样,不同之处是将大臂进行柔性化处理,即做刚柔耦合混合模型进行联合仿真。
3:PID控制和模糊自适应PID控制
课程相关图片: