简介
目录(试看)
评价
课程亮点
- 作者优秀
- 从业CAX行业时间10年及以上/优秀教师
- 用户好评
- 课程评分大于4.8,带字好评量大于等于10个
- 内容充实
- 工程案例/内容体系完整
- 平台推荐
- 主编推荐/内容稀缺/全网独家
服务:
- 课程资料下载
- 在线开票
- 提供培训通知
- 交流群
本课适合哪些人学习:
1.风电机组控制工程师及载荷仿真工程师。
2.相关专业在校学生。
3.企业从事控制器设计及载荷仿真的专业人员。
你会得到什么:
1.变速变桨风电机组正常运行控制原理。
2.PID控制器原理及传递函数。
3.连续传递函数离散化。
4.PID控制器介绍及编程,包括两种PID控制器,第一种是根据时域公式设计PI控制器,第二种是根据频域公式设计PI控制器。
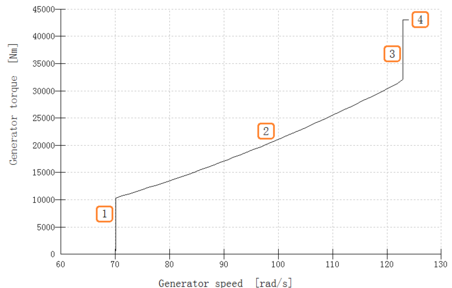
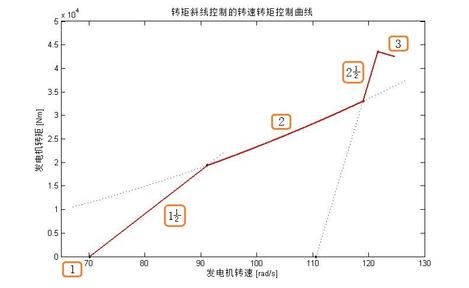
5.转速-转矩控制器介绍及编程,包括PI控制法和转速转矩查表法。
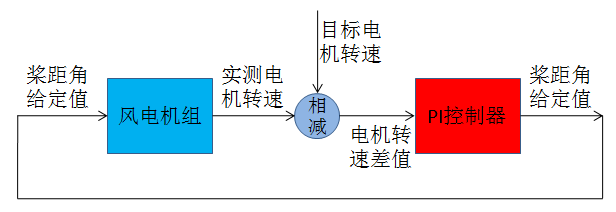
6.转速-桨距角控制器编程。
7.延时函数编程。
8.偏航控制器编程。
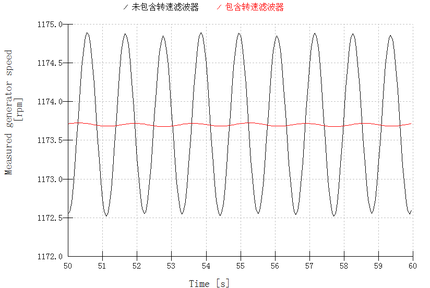
9.在控制器中添加一阶低通滤波器。
课程介绍:
Bladed软件是DNV GL公司开发的用于风电机组建模及载荷计算的软件,该软件可针对陆上及海上风电机组进行建模仿真,主要用于输出各个部件的时序载荷、极限载荷及疲劳载荷,用于风电机组各部件设计及选型。
课程主要内容如下:
1. 变速变桨风电机组正常运行控制原理。
2. PID控制器原理及传递函数。
3. 连续传递函数离散化。
4. PID控制器介绍及编程,包括两种PID控制器,第一种是根据时域公式设计PI控制器,第二种是根据频域公式设计PI控制器。
5. 转速-转矩控制器介绍及编程,包括PI控制法和转速转矩查表法。
6. 转速-桨距角控制器编程。
7. 延时函数编程。
8. 偏航控制器编程。
9. 在控制器中添加一阶低通滤波器。
每周更新5到6讲,预计2周更新完毕。课程目录如下:
| 1 | 风电机组控制介绍及外部控制器设计 |
| 1.1 | 转速-转矩PID和转速-桨距角PID控制 |
| 1.1.1 | 变速变桨风电机组正常运行控制原理 |
| 1.1.2 | PID控制器原理及传递函数 |
| 1.1.3 | 连续传递函数离散化 |
| 1.1.4 | PID控制器介绍及编程 |
| 1.1.5 | 转速-转矩控制器介绍及编程 |
| 1.1.6 | 转速-桨距角控制器介绍及编程 |
| 1.2 | 转速-转矩查表法和转速-桨距角PID控制法 |
| 1.2.1 | 变速变桨风电机组正常运行控制原理 |
| 1.2.2 | PID控制器时域公式 |
| 1.2.3 | PID控制器编程 |
| 1.2.4 | 转速-转矩控制器编程 |
| 1.2.5 | 转速-桨距角控制器编程 |
| 1.3 | 延时函数介绍 |
| 1.4 | 偏航控制器介绍及编程 |
| 1.5 | 在控制器中添加一阶低通滤波器 |
| 1.6 | 其他控制技术介绍 |
| 1.6.1 | 传动系统的扭转振动控制技术 |
| 1.6.2 | 塔筒振动控制技术 |
| 1.6.3 | 柔性塔筒共振区快速穿越控制技术 |
课程相关图片: