本课适合哪些人学习:
1、机器人设计相关人员
2、理工科院校学生
3、结构仿真工程师
4、Solidworks软件学习和使用者
你会得到什么:
1、了解家用服务机器人的成本及功能
2、了解如何有效降低家庭服务机器人的成本
3、掌握家用服务机器人控制方面的设计
课程介绍:
2021年金砖五国工程仿真创新大赛本科组作品:可更换式家用消毒代步多功能球体自平衡底盘,大赛预选作品原文详见大赛页面链接:https://www.fangzhenxiu.com/share/activity/competition

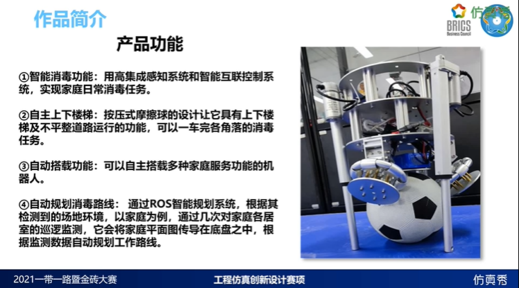
通过对家用服务机器人的调研分析,目前已有的家用服务机器人虽然种类繁多,但价格普遍较高,功能单一,不能有一款机器人可以胜任多种家庭任务,在球体自平衡研究的过程中我们发现可以利用球体自平衡通用底盘,将多种功能器件搭载在一个通用底盘上,可以有效降低家庭服务机器人的成本。从而推进家庭智能服务机器人的快速发展。
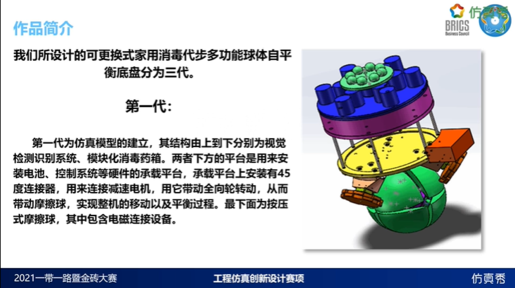
这款通用底盘充分利用了球体机器人移动灵活性、具有0转弯半径等优点,可以适应于各种布局的家庭服务工作。这款通用底盘分为两层,顶层为一个平台,可以搭载多种不同型号和功能的机器人,第二层为电池仓以及ROS等功能模块和控制模块的安装位置,并且在第二层底部安装有连接器,用来安装减速电机及全向轮。再将整体机身搭载在按压式摩擦球上,通过减速电机带动全向轮,再由全向轮控制按压式摩擦球实现通用底盘的运动功能。为了提高球体自平衡家用底盘的稳定性,设计了按压式摩擦球,球体分为三层,中心球设计为空心结构,并且在中心球中安装电磁铁设备,用来增大全向轮与摩擦球之间的摩擦力,从而提升其动力。二级结构与三级结构中间由弹簧相连,由于全向轮与摩擦球总是作用在三个模块上,所以对于机身来说,总是相对于摩擦球平衡的,当道路上出现凹凸不平的情况时,由于每个模块受力不相同,所以每个模块位置会根据道路的不同而不同,但最终保持整个机身处于相对平衡状态。
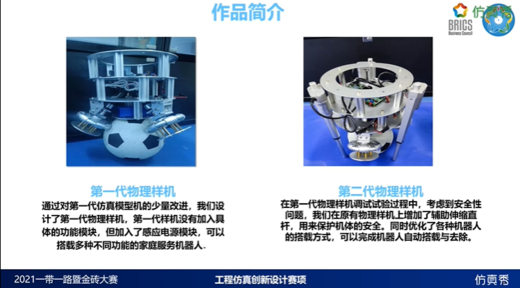
控制方面,主要包括单片机、步进电机、激光雷达以及ROS系统等,单片机是整个控制系统的中心,步进电机为整机提供动力,激光雷达用来检测车体实际情况,间接控制伸缩杆运行,保证其安全性,ROS系统用来自动规划路线。
在制作过程中,主要采用了铝型材和塑料橡胶材料,利用线切割,3D打印等技术,制作出相应的零部件。经过安装测试调整,最终完成了物理样机的制作以及可行性测试。
课程相关图片: