【MBD】使用系统仿真软件 Altair Activate™ 控制多体机械手臂路径

本文摘要(由AI生成):
这篇文章主要介绍了如何使用 Altair 系统仿真软件——Altair Activate™控制多体机构运动模型。首先,建立一个四轴的机械手臂运动模型,设置好控制参数、输入及输出参数以及 Force 指令。然后,利用 PID 控制器来控制机械手臂的运动路径,通过调整 PID 控制器的参数来使实际运动路径与命令曲线趋于一致。最后,通过对比利用 MotionView 设定模型和利用 Activate 控制模型两种方式的计算结果,展示了利用 Activate 控制模型可以实现精准的路径控制。
本期将为您介绍如何用Altair系统仿真软件 - Altair Activate™控制多体机构运动模型。利用PID控制器达到控制路径的监测、确保实际运行路径(转轴角度)与施加的命令曲线趋于一致,以及得到多体模型中需输入的转矩。
本文会以一个机械手臂路径规划的范例来讲解,欢迎点击下方链接下载模型,跟着文本一起实践操作。文章最后还有全程的视频演示,大家也可以跟着视频进行学习~
多体运动模型-MotionView
多体运动模型-MotionView
首先我们需要有一个设定好的多体运动模型,设置好一个四轴的机械手臂,建模重点包含多体机构运动学中的接触(Contact)、约束(Joint)、运动控制(Motion)等,有了这些系统即可完成机械手臂的路径运动。
然后再进一步设定控制参数、输入及输出参数,以及Force指令读取输入的转矩力量值施加在旋转轴上。
施加强制角度位移控制-Motion
施加强制角度位移控制-Motion
我们用Motion(强制角位移)的形式,赋予每一个旋转轴在整个运动过程中的角度控制,用这种方式可以让转动角度完美的依照使用者定义的曲线转动,精准地控制每一个时间点各轴的转动位置,就像一般我们做结构分析常用的强制位移曲线一样。
在此范例中我们需要四个Motion控制四个旋转轴(如下图所示),设定完后可以点击Run,计算得到机械手臂运动路径。

设定输入及输出参数-Solver Variable
设定输入及输出参数-Solver Variable
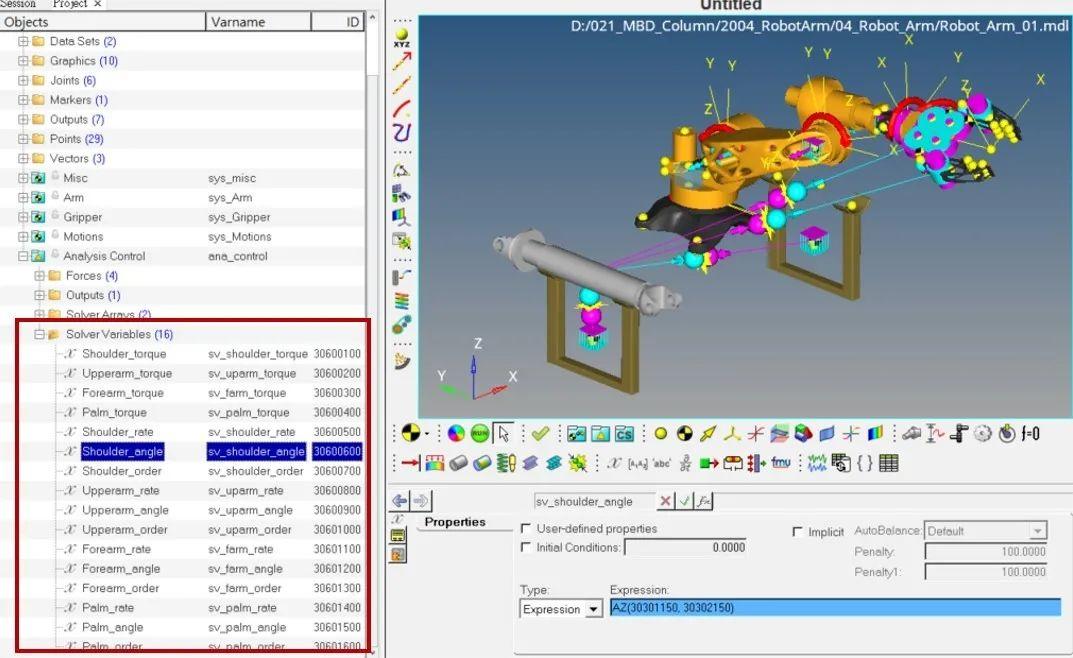
为了要利用Activate模组做控制路径,需要定义输入及输出参数,输出参数分别为转轴角度-Angle,转轴角速度-Rate,以及转轴的角度控制命令曲线-Order,输入参数为施加于转轴的转矩值-Torque。
设置力量控制-Force
设置力量控制-Force
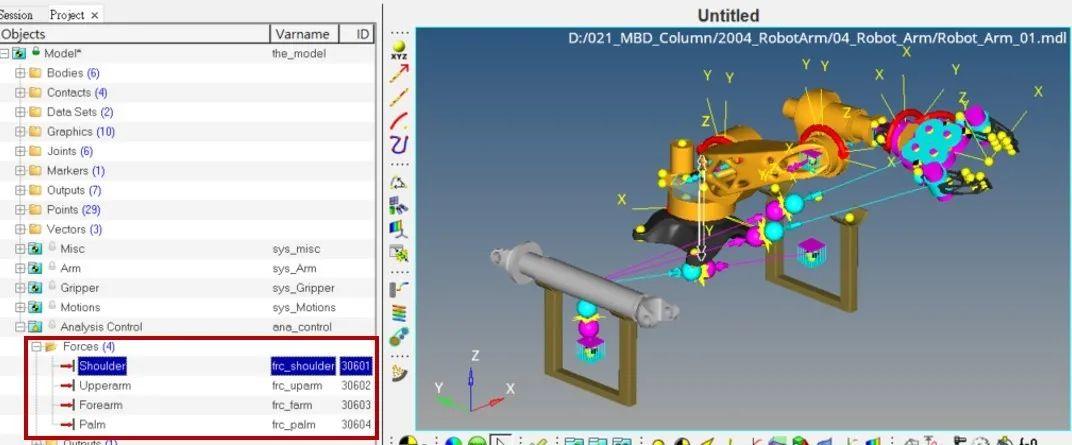
设置Force施加转矩于转轴上,Force的数值即为输入参数的值。每个旋转轴需设置一组转矩控制-Force。
设定完后即可把前述的运动控制(Motion)关掉,转轴的运动即改为使用Force驱动。这里因为还没有使用控制模型,直接运行后会看到手臂没有依照命令路径运动。
设置输入及输出矩阵-Solver Array
设置输入及输出矩阵-Solver Array
有了输入输出参数后,还需要设定输入输出矩阵,才可以在控制模型中读取多体模型的输入值及输出值。

控制系统模型-Activate
控制系统模型-Activate
利用控制模组建立一个PID控制器系统,并且利用Activate的多体模型信号器读取前述的多体模型。
PID控制器及马达驱动
PID控制器及马达驱动
控制系统两大主要区块——PID控制器及马达驱动。如下图左方为输入参数(角度、角速度及转轴控制命令),进入中间PID控制器,输出dVh参数给右方马达驱动器,得到需要输入的转矩值(Torque)。

多体模型信号区块
多体模型信号区块
Activate内建立读取多体模型的工具(MotionSolveSignal),选择多体模型,指定输出mrf格式后,自动读取在多体模型中设定的输入输出参数。这个例子中多体模型输入参数为转矩(Torque),输出参数为转轴角度、角速度及角度命令。

曲线输出信号
曲线输出信号
利用Activate的绘图工具(Scope),输出计算过程中的角度、角速度、转矩曲线。角度及命令曲线绘于同一图形区块,可以看到实际角度及命令曲线的吻合程度,通过修改PID控制器的Kp、Ki及Kd值,可以得到不同的角度控制曲线,最终目标为使两条曲线趋于一致。
这里我们简单介绍一下三个参数的意义:
Kp:比例控制项,考虑的是当前的误差
Ki:积分控制项,考虑的是过去的误差
Kd:微分控制项,考虑的是未来的误差
计算结果
计算结果
Activate控制模型设定完成后,点击Simulate执行计算,计算过程中可以看到转矩曲线及角度曲线输出。
读取计算完后的h3d动画档案,与初始阶段使用MotionView设定模型相比,两者的运动路径几乎相符。



