AVL-虚拟环境下换挡策略 SOP 标定
1.引言
为了应对越来越多的车型和较高的成本压力,需要发展一种能够减少原型样车数量的新的标定方法,并确保其能覆盖所有车型,且有较高的数据质量。现代混合动力和传统动力总成的驾驶和换挡策略的标定的特征在于其需求相互矛盾,尤其是在驾驶性方面,通常采用主观评价的方法。目前有一种工具,AVL SPA™,基于档位的选择对换挡曲线进行驾驶性评估,它对驾驶性的评估是基于大量的客观评价标准。该工具能很好地对水平和坡道换挡线进行评估和初始标定。然而,样车的开发和对其的主观评价仍是有必要的。换挡策略需要考虑快松油门、曲线行驶等特殊情况,在这些方面,工程师仍需基于高度主观印象工作。客户的预期与需求没有转化为精准的动力总成需求和标定目标。有经验的标定工程师了解其标定中关键的相互作用点并对其进行手动或迭代优化。然而,没有定量的标准来评价驾驶性,也没有针对驾驶性和排放自动生成驾驶策略和换挡策略的方法。其他的目标,例如驾驶模式,品牌DNA 和目标市场的特殊需求,都未在驾驶和换挡策略中考虑。虚拟环境中,可被量化的客观标准是驾驶策略的客观评价和标定的基础。AVL 开发了一种解决方案和与之相应的工作流程,使标定工作可以更进一步。本文展示了一个客户项目的标定实例, 以说明虚拟标定的好处与必要性。2.初始情况
AVL 的任务是对传统的七速 DCT 乘用车进行 TCU 软件开发和变速箱标定。该项目的时间节点要求尽早开始进行车辆标定和软件测试,而较晚的样车发布预计时间使标定任务更为艰巨。因此,我们提出对项目的换挡策略进行虚拟标定。这意味着从标定的角度改变了项目的计划,现有的任务转变成建立真实的发动机和车辆的模型,对车辆模型和TCU 软件进行联合仿真,开发并验证可以评价车辆表现的客观标准。最终的目标是得到接近SOP 最终标定的标定结果,也就是说, 坡度检测和从水平道路到坡道换挡规律的坡度插值的标定是主要任务,此外还应考虑车辆曲线行驶过程的弯道检测。3.设置虚拟环境
3.1.车辆和发动机模型
市场上有多种可用的车辆模型,它们各有优缺点,本文换挡策略的仿真对车辆模型有一些具体的要求。最重要的要求是能设置可以连接 TCU 模型的联合仿真接口,或者至少使 AVL TCU 软件可以连接到车辆模型并使用相关功能。车辆仿真还应包括一个发动机模型,由于时间有限,无法建立详细的发动机仿真模型,所以该模型应易于基于加速踏板进行参数化。我们的目标不仅是让车辆沿笔直的道路行驶,还要使其能够在有曲度、可变坡度的道路上行驶,因此,有必要对包括横向动力学的车辆动态驾驶过程进行仿真。由此,采用 AVL VSM™作为车辆仿真软件,它满足上述所有要求,作为内部工具简化了支持工作和一些潜在的定制解决方案。此外,AVL VSM™具有轨迹生成器,可以简化路谱的生成。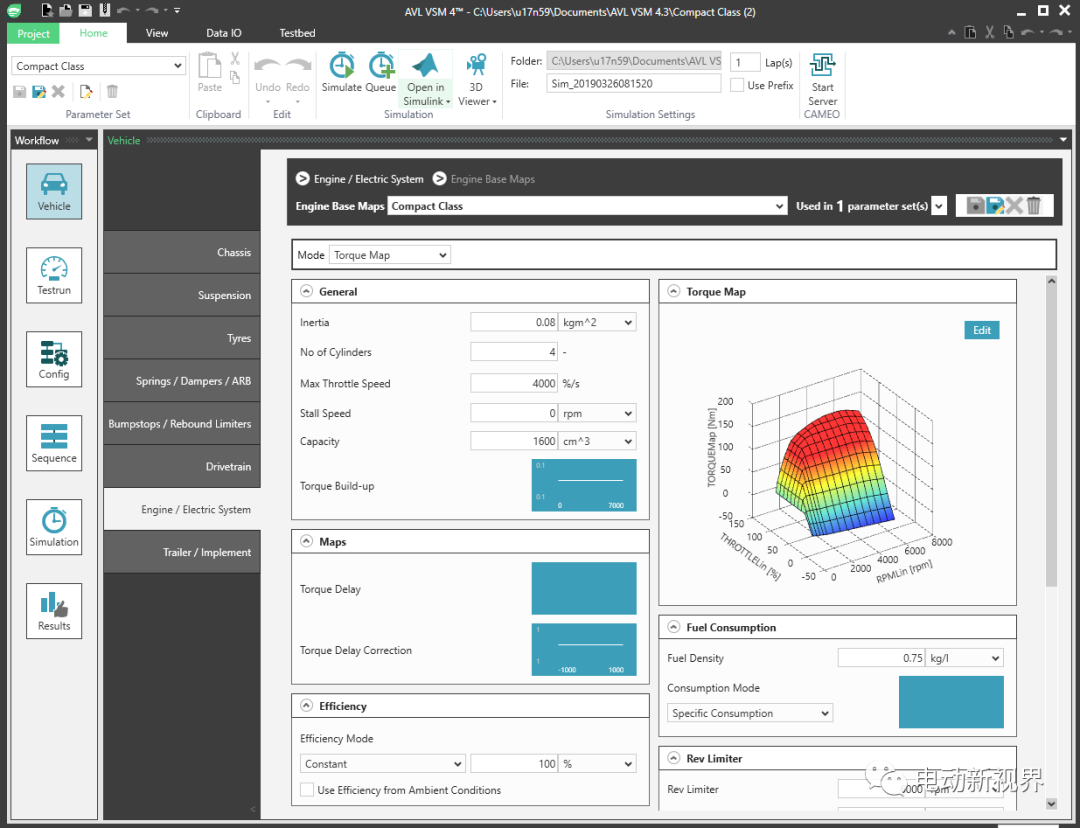
图 1:用于发动机配置的 AVL VSM™ 接口(默认)
模型质量检查
AVL 对已有的样车进行了测试,可以对车辆滑行、加速的真实测试过程与模型进行对比。结果显示试验与模拟数据较为吻合,这意味着模型质量满足虚拟标定的要求。试验与模拟数据如图2 所示。
图 2:模拟车辆(红色)和真实车辆(黑色)的滑行和加速行为的对比
轨迹生成
我们计划模拟山区道路,来取代笔直道路不同坡度轻踩油门或恒油门升档的标准工况。在格拉茨周围有几条道路适用于换挡策略标定,其中有一条被叫做 Rechberg 的道路,有急弯、缓弯和不同的坡度。我们的目标是进行换档策略标定,以实现车辆在 Rechberg 道路上良好的可驾驶性。
为了测量的准确性,以及后续测量数据与仿真结果的对比验证,采用 ADMA 装置对Rechberg 进行测量,提取加速度测量信息和修正的 GPS 位置信息。这类数据可以导入 AVL VSM™,通过对曲线和横向加速度的平滑细化,可以进行轨迹生成。从谷歌地图提取的该轨迹如图 3 所示。
图 3:卫星地图视图中的Rechberg 轨迹
从图中可以看出, 该轨迹可以考虑车辆的曲线行驶的弯道检测。AVL VSM™中生成的Rechberg 道路的海拔高度和坡度如图 4 所示。其坡度变化范围为 0%-10%,最终车辆爬升 200 米。
图 4:Rechberg 道路的坡度和海拔高度
3.2.调整 TCU 软件
完整的 TCU 软件包括许多不同的功能,如诊断,换档顺序或档位选择。要实现 TCU 所有的功能需要模拟与其相关的所有信号并将其处理后发送给 TCU,这需要大量的工作。针对特定的任务,可以对TCU 软件进行分离,只保留档位选择部分。这意味着只有小部分信号需要由车辆仿真软件提供,而且 TCU 软件产生的信号也减少了。TCU 是由 Simulink 模型实现的,易于对输入输出信号进行识别,还可以从中提取换挡策略部分。并非所有的必要的输入都可以被提供给 AVL VSM™,因此必须将一些信号设置为常量,但在后续工作中可以对其进行更改或参数化,或在Model.CONNECT™直接设置。
由于基于 m 文件,使用 Simulink 模型会使参数的更改非常耗时。此时,需要使用内部工具fmi.LAB 将 Simulink 编译为 FUM(功能模型单元)。Model.CONNECT™启用 XCP 连接,生成了基于TCU 软件可调参数的hex 和a2l 文件。将这些文件与XCP 连接后,可以使用ETAS、INCA或 Vector CANape 等标定工具在模拟中进行实时标定。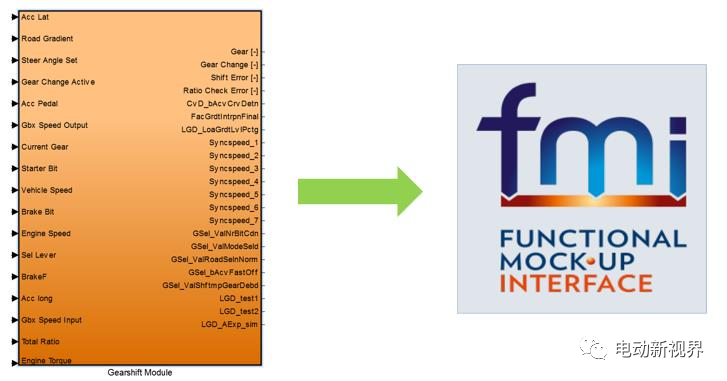
图 5:换档模块拆分与其到 FMU 的编译
3.3.使用 AVL SPA™ 预先标定
AVL SPA™已经成为知名的换挡线生成和评估工具。建立SPA 模型并进行模拟仿真是进行评估的第一步,基于仿真结果可以对平路和坡道的换挡曲线进行优化。除满足法规要求外,标定的重点是使平坦道路和坡道的换挡评分均达到 6.5 分以上。图 6 显示了平路和坡道换挡线的所有的评分细节。某些标准下的坡道换挡评分更高是因为在爬坡时坡度带来了更高的发动机转速,从而导致更大的发动机扭矩和更好的加速响应。
图 6:平坦道路和坡道换挡线的详细 SPA 等级(10%坡度)
3.4.与Model. CONNECT™联合仿真
Model.CONNECT™是一种可以使不同仿真模型彼此交互的联合仿真工具,它最大的优点是允许对具有不同循环时间的模型进行联合仿真, 这意味着模拟用时比实时测量更短。Model.CONNECT™还提供了所有连接仿真模型的通用接口,其中包括 XCP 选项的连接,这使得软件的使用非常简单。将 TCU 软件模块和 AVL VSM™模型导入 Model.CONNECT™之后,需要定义两者之间的信号传输。为了得到更好平衡发动机转速和噪声,添加了模拟发动机声音的FMU。Model. CONNECT™设置如图 7 所示。

图 7: Model. CONNECT™中的模拟布局概述
4.定义换挡策略客观分析的标准
为了客观地评价和优化换挡策略,制定了一系列的标准来指导标定和记录改进情况。第一个标准是计算当前档位的扭矩储备和相应的加速度储备,并根据可能的加速度储备给出评分。第二个标准是减少或消除档位的反复切换,例如 3-4 升档被触发后,短时间内进行 4-3 降档又进行 3-4 升档时,会标记此工况并对驾驶情况进行分析。此外,还会计算换挡总次数,目标是在相同的轨迹和循环中,使换挡次数最小化。5.虚拟标定和优化结果
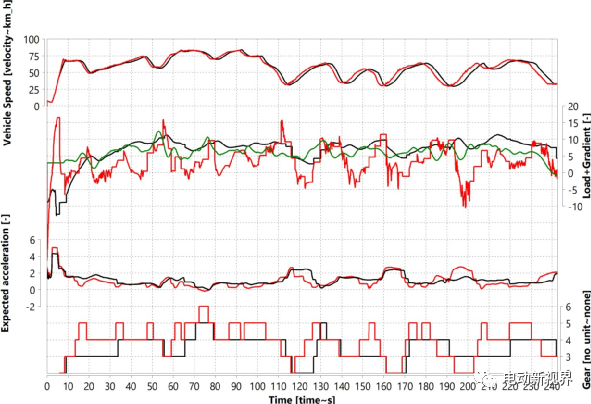
图 8:初始数据集(红色)和最终数据集(黑色)的结果比较
在初步的模拟中,AVL VSM™驾驶员模型跟随 Rechberg 道路实际驾驶测量得到的速度曲线, 模拟结果表明车辆的驾驶性不够令人满意。第一个问题是道路坡度测量的准确性。在TCU中,通过维持恒定速度或加速度的车辆需求扭矩来计算道路坡度,结果值被称为“负载斜率”(Load Gradient)。在图 8 的模拟结果中可以看出,初始的模拟结果为红色,负载斜率波动很大,并且无法与真实的道路坡度(绿色)匹配。该信号是平路与上坡或下坡换挡曲线进行插值的主要输入, 它的质量是良好的驾驶性的基础,所以维持负载斜率的稳定性是至关重要的。因此,需采用不同的软件输入(如滤波时间)来改善道路坡度测量的准确性。另一个在初始模拟结果中显著部分是换挡次数。在图 8 中我们得到了 48 次换挡,根据经验, 对 Rechberg 道路而言这个换挡次数偏多。此外,12 次的反复换挡次数也明显偏多。这两个数值都是根据前文的标准计算得到的。爬坡条件的性能方面,我们重点关注加速度储备。在一些有坡度较高的地区,加速度储备减少过快或者减少过多都是不够令人满意的。确保加速度的储备,需要使车辆维持在低档位和发动机高转速,这会带来较大的发动机噪声。我们引入了声音模块来模拟发动机的噪声,从而提供加速度储备和发动机噪声之间的折中方案。在标定负载斜率之后,目标是减少换挡次数,消除反复换挡并确保足够的加速度储备。为了实现这一目标,有必要在虚拟环境下对进行车辆标定工作。标定工程师使用对车速、负载斜率进行插值得到坡道换挡曲线的方法,在恰当档位选择方面,得到了更好的结果。下一步是考虑曲线行驶过程的弯道检测,以避免在曲线行驶或转弯过程的升档。优化可基于车辆模拟仿真的可视化和纵向加速度的计算结果。最终的虚拟标定结果在图 8 中以黑线表示。通过对上述标准的考虑和标定,换挡次数从 48 次减少到 20 次,检测到频繁换挡次数从 12 次减少到 1 次,在确保无过大发动机噪声的情况下平均加速度储备从 1.06 m/s²上升到 1.19 m/s²。6.模拟结果验证
为了检验虚拟标定的结果,有必要对其进行实车验证。完成虚拟标定部分后,具有一定成熟度的样车也发布了。为了进行验证,我们将虚拟标定的结果运用在样车实车上,在 Rechberg 道路上进行驾驶测试,得到了满意的结果,车辆与预期的表现一致。标定工程师仍进行了一些小的调整,在 3 档高转速区,因为发动机的噪声过大,而加速度储备足够,使 3-4 升档略微提前。此外,还需要进行一些功能的调整和标定(比如急松油门),因为在虚拟标定中没有考虑这些工况。图 9 展示了虚拟环境下最终标定(红色)与调整后的实车测试(黑色)的数据对比。
图 9:虚拟环境下最终标定(红色)与调整后的实车测试(黑色)的数据对比
7.结论
本项目不仅证明了虚拟标定的可行性和有益性。在样车还无法进行标定的阶段,可以在虚拟环境中展开标定工作,随后可将其直接运用于发布的样车。检测道路坡度、实现良好的加速度储备、考虑曲线行驶和避免不必要的换挡等任务都可以在虚拟环境中进行,并得到充分的输出结果。模拟可在不到 2 分钟的时间内,完成对 4 分钟驾驶循环的仿真,并且不必考虑车辆的可用性,车辆运输到测量地点的时间,燃油消耗和样车零部件失效等问题,可以节约大量的时间和资源。此外,标定工程师可以基于较为成熟的工作进行标定,有更多的机会专注细节。虚拟标定的不足是 缺乏对某些标准或影响因素的考虑,因此无法让所有的标定工作都在虚拟环境中进行;需要对TCU软件进行拆分并对仿真环境进行设置,这也需要一定的时间。总的来说,在这个项目中可以收获很多的方法,并带来更高效的“最佳方案”。


