读书笔记:《无人驾驶车辆理论与设计:慕课版》

“ 经常有朋友问有没有学习仿真的相关书籍推荐,于是搜集和阅读了一些,记录在这里,向大家分享。如果大家有觉得好的书籍,也请留言推荐,不胜感激。”
《无人驾驶车辆理论与设计:慕课版(第2版)》:熊光明,龚建伟,陈慧岩主编. 北京:北京理工大学出版社,2021.4

本书系统的讲解了无人驾驶无人化改造、电子电气架构、传感器标定等硬件相关知识以及环境感知、定位导航、决策规划和运动控制等软件相关知识,并简述了智能网联应用和测试评估等内容。
包含实验操作附录在内全书共分11章,概述如下:

(1)第1章为绪论,简介了国内外无人驾驶的发展历程和应用前景等内容。
(2)接着三个章节介绍了硬件相关知识。
第2章分别介绍了常见的转向系统、油门和制动系统和无人化改造方案。对于电动助力转向系统EPS有三种改造方法:①通过伺服电机带动方向盘转动;②断开原车方向盘转矩传感器,并提供伪转矩信号以触动EPS控制器;③断开原车EPS控制器,连接自行设计的电机控制器。对于电子节气门系统,通过模拟原油门的电压信号实现改造,并通过继电器实现模拟信号和原始信号的切换。制动系统的无人化改造,既要能在无人驾驶状态完成制动动作,又要能够实现人工干预下的机械制动,一般有两种改造方法:①在原车制动系统上添加动力结构驱动制动踏板;②添加与原始制动系统并联或串联的制动阀体、管路等,并能实现与原始制动系统的切换。
第3章介绍了无人驾驶车辆电子电气架构及其硬件,具体包括:环境感知常用的传感器(激光雷达、毫米波雷达、相机)、定位导航常用的传感器(GPS、惯导)、车载通信(串口、以太网、CAN和转换器)、车载计算平台(计算机、工业控制计算机、嵌入式计算平台等)和车载供电系统(不同设备需要不同的供电电压和功率)。
第4章介绍了传感器标定相关知识,通过标定可以得到各个传感器坐标系与车体坐标系之间的转换关系。具体的,介绍了单目相机、双目相机、单线激光雷达、多线激光雷达标定的原理和方法以及相机与激光雷达的联合标定。
(3)然后四个章节介绍了软件相关知识。
第5章是环境感知相关内容,包括基于相机、基于激光雷达和融合感知。其中基于相机的感知,首先要进行包含灰度化、降噪和边缘增强的预处理,然后介绍了基于Hough变换的车道线检测和基于AdaBoost和OpenCV的车辆检测,并都给出了编程示例。基于激光雷达的感知,可通过二维栅格地图的方式识别障碍物,通过雷达回波信号识别车道线。传感器融合包括毫米波雷达与相机的融合、激光雷达与相机的融合。本章还介绍了深度学习(卷积神经网络)的原理和采用YOLO进行STOP标志检测示例。另外介绍了卡尔曼滤波的步骤和案例。
第6章是定位导航相关内容,包括基于GPS定位、基于GPS/DR定位、基于高精度地图的定位和SLAM技术。为减少GPS定位误差,可以采用差分技术提高定位精度,RTK是载波相位差分的一种方法;基于惯性传感器实现的航迹推算(DR)可提高车辆定位的连续性和可靠性。同步定位与地图创建(SLAM)是指无人驾驶车辆在未知环境中,从某一位置出发,在运动过程中通过采集环境信息,同时进行车体定位和地图创建,这依赖于每一时刻都观测到新的和旧的路标点,从而进行递进式的工作。激光雷达SLAM包括前端(特征提取、数据提取、地图更新)、后端(误差校正)和回环检测(识别之前到达的场景)等步骤。视觉SLAM与此类似。
第7章是决策规划相关内容,包括行为决策、路径规划和运动规划。行为决策可以采用基于规则(状态机)的方法,也可采用基于统计(机器学习)的方法。路径规划包括全局路径和局部路径,可以采用基于搜索的方法(Dijkstra、A*、改进的A*),也可采用基于采样的方法(确定性采样和随机采样),其中确定性采样包括控制空间采样和状态空间采样。运动规划包含了对速度的要求,可以采用动态窗口算法DWA实现,即:先建立车辆模型;再在满足车辆限制的动态窗口中,对速度空间进行等间隔采样,形成一组可行的参考轨迹;然后构造评价函数,选择最优的一条轨迹。
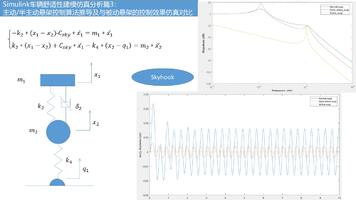
第8章是运动控制相关内容。可以由纯跟踪算法和Stanley算法得到控制目标,然后通过PID和MPC控制实现目标跟踪。
(4)第9章介绍智能网联应用场景和案例。V2X是将车辆与一切事物相连接的新一代信息通信技术,从而获得超出车载传感器的信息输入。具体的应用场景包括多车编队、遮挡情况下的自动紧急制动、交通标志识别和匝道入口汇流等,并给出了在PreScan中进行匝道入口汇流场景的仿真示例。
(5)第10章简介了无人驾驶的设计方法以及测试方法(仿真和实车)。仿真测试包括基于数据集和基于软件的仿真测试;实车测试包括比赛测试、封闭场地测试和实际道路测试。
(6)最后的附录中介绍了在V-REP中进行激光雷达仿真、通过MATLAB+V-REP进行联合仿真测试纯跟踪控制算法的方法,并对MATLAB自动驾驶工具箱的应用案例进行了介绍。